Cible Robotique de Polytronic - RT
Le programme de cibles robotiques Polytronic complète l’approche de la société visant à fournir une solution de formation au tir réel à spectre complet. C'est un pas en avant dans l'environnement d'entraînement au tir réel qui améliore le réalisme grâce à des cibles robotiques semi-autonomes avec un comportement interactif et des réactions et mouvements imprévisibles. Elevant le tir d’élite à un niveau encore plus élevé, grâce à des réactions et modèles statiques et prévisibles aux cibles, à un entraînement au tir réel plus réaliste et immersif. Un système de cible robotique intelligent, polyvalent, réaliste et facile à utiliser.
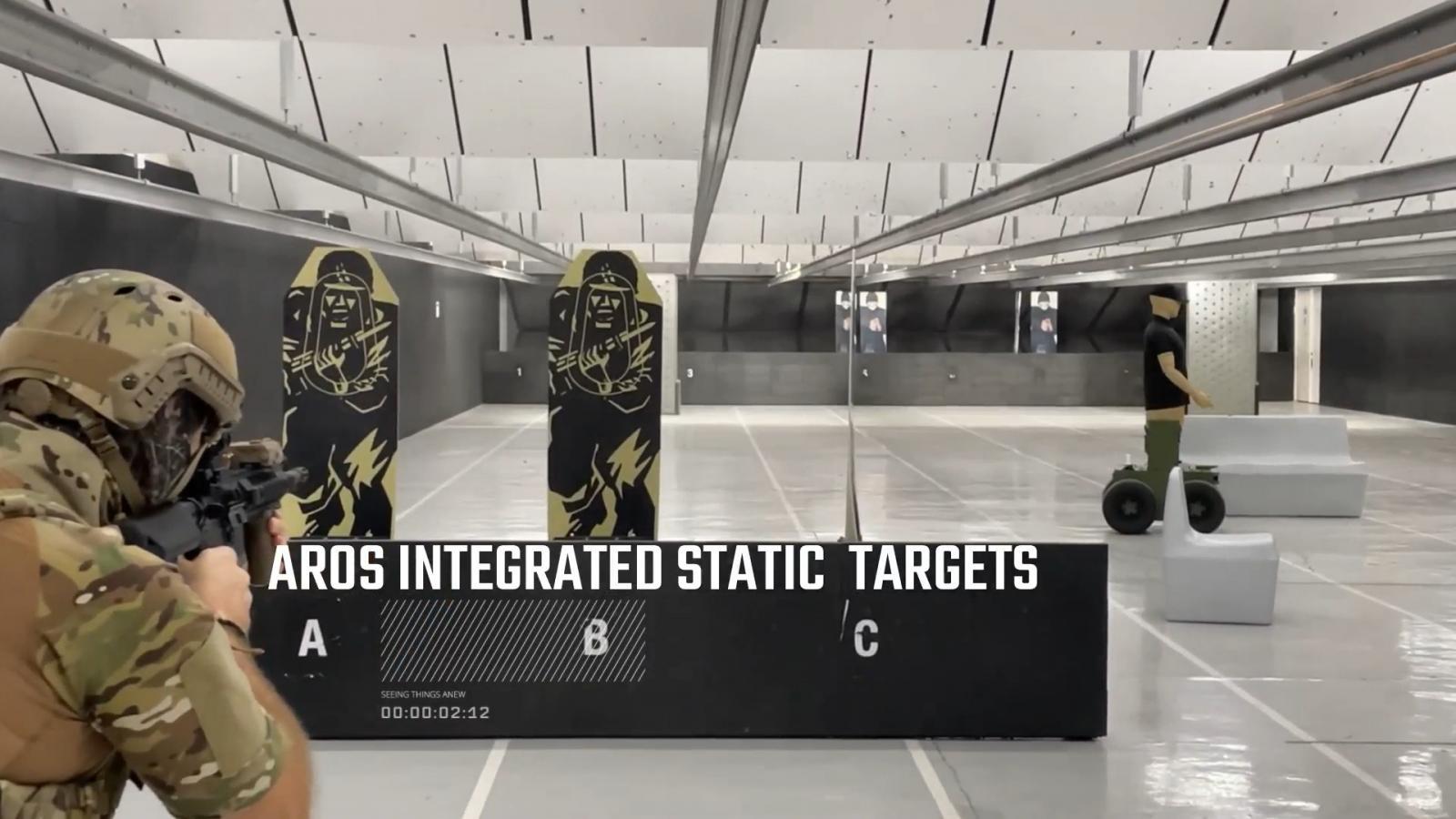
Entrainement réaliste
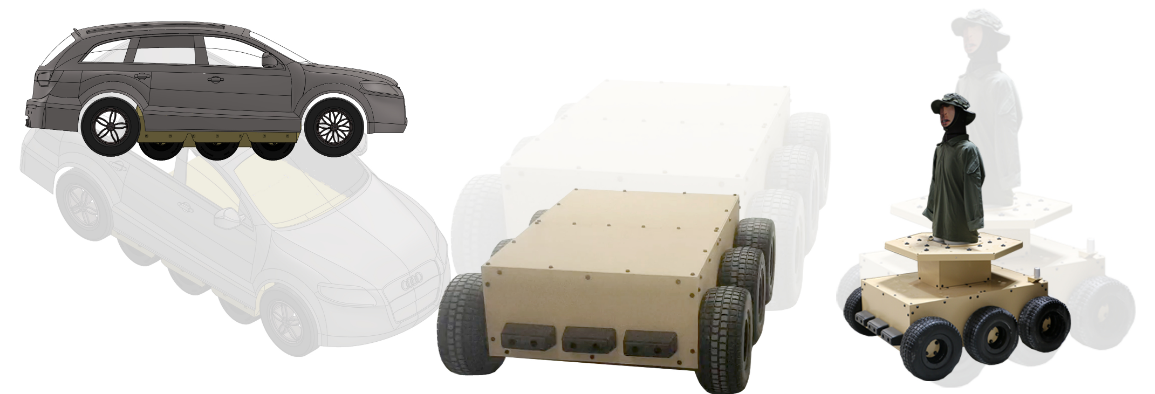
Modularité et évolutivité
Répondre aux besoins individuels de différents utilisateurs finaux est un défi en soi. Le RT Polytronic programme fournit la réponse en étant modulaire et évolutif à la fois. Que vous vous concentriez sur l’entraînement CQB, ou des entraînements armés combinés, Le polytronic RT est le bon choix.
RT - CQB
RT - CQB - il est petit, agile, réaliste. Il peut se cacher derrière le mobilier, apparaît rapidement presque de nulle part et est equipé d’un système de détection zéro.

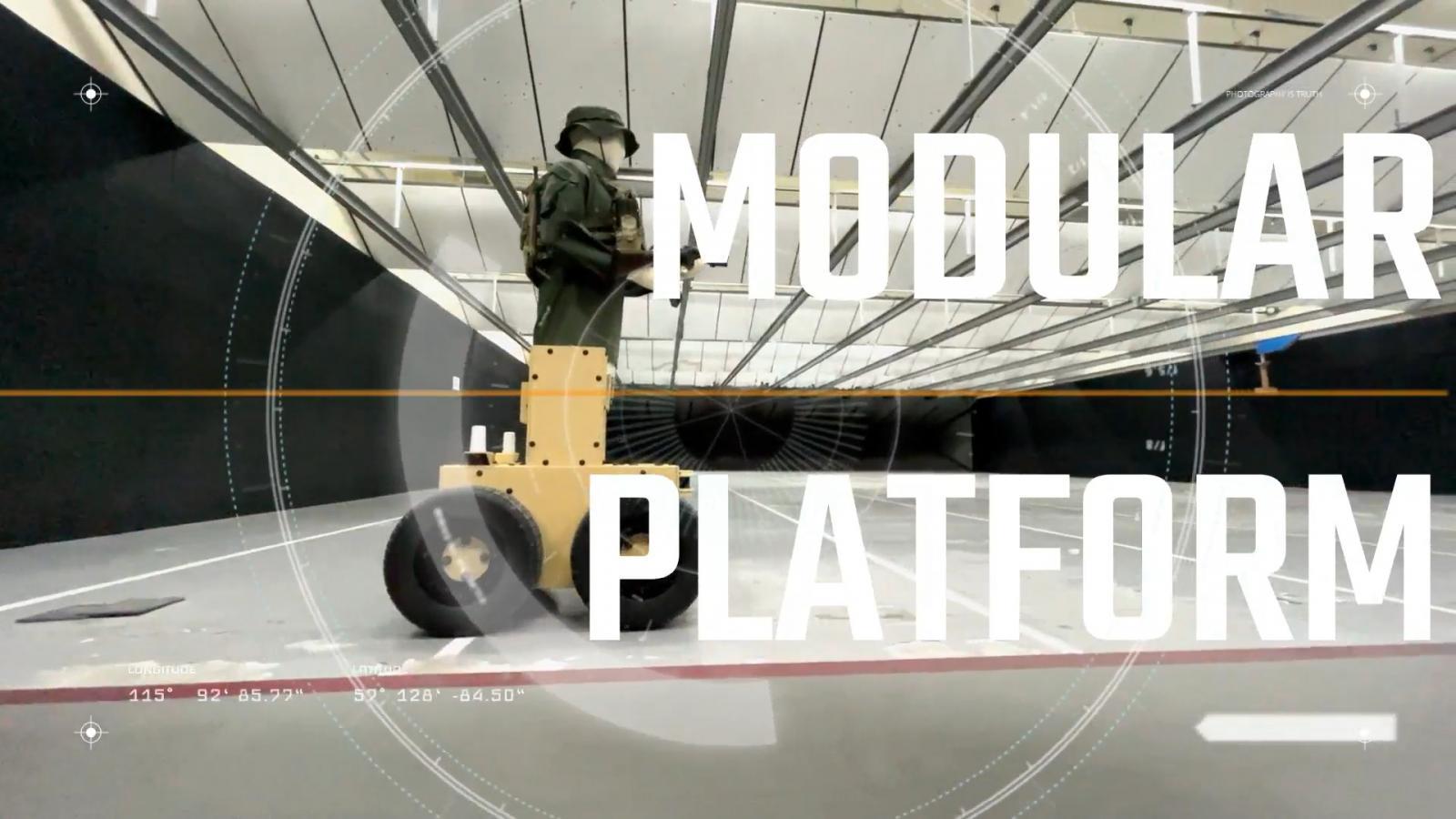
RT - But Modulaire
Une cible robotique polyvalente et modulaire pour plusieurs applications d’entraînements. Equipé d’un mannequin 3D apparaissant ainsi que d’un système de détection zéro, l’entraînement interactif et immersif devient enfin disponible.

RT - M6
Si les équipements standards atteignent leurs limites, The RT-M6 commence à sentir à l’aise. Qu’il traverse de hautes dunes de sable ou escalade des sols glacés et des rues boueuses, Le RT - M6 est fait pour maîtriser ces défis.
Interactivité par LOMAH et détéction de frappe
LOMAH et la capacité de détection de frappe sont des éléments clé à l’interactivité dans l’entraînement au tir réel. En ajoutant LOMAH, le Near Miss Detection system, et la détection de frappe au RT permet de programmer des réactions cibles interactives et réalistes appropriées à l’aide du système de contrôle AROS. A 360° facile à utiliser. - LOMAH assemblé à un Polytronic RT fournit des AAR capabilités en plus pour l’entrainement de sniper ou permet le RT de se cacher en cas d’échec, créant ainsi un environnement d’entraînement au tir réel interactif et réaliste. The Near Miss Detection System peut être assemblé au RT au forçant ainsi un seul, ou un groupe de robots, à se retirer lorsque des tirs à proximité sont détectés, ou restent couverts, tant qu'un tir suppressif est appliqué par la force BLEUE.
La détection de frappe est intégré à tout les mannequin 3D, fournissant des information sur les débat d’une frappe sur la cible et enclenchant la réaction appropriée de la cible comme la chute ou le retrait. En ajoutant des capteurs aux voitures 3D ou aux maquettes de chars améliorer le réalisme de l'entraînement par une réaction de frappe appropriée. Si un impact sur les roues ou les chenilles force une cible à arrêter son mouvement ou à changer de direction, un impact direct sur le bloc moteur ou la tourelle d'un char indique que la cible est neutralisée.
Intelligence et contrôle

Le cerveau interne du RT contient la capacité de recherche autonome de trajet ainsi qu’une technologie de fusion de capteurs d’intelligence, ce qui confère au RT un comportement semi-autonome. L’ajout de la technologie d'évitement d'obstacles dynamique, garde le RT sur la bonne voie, en le conduisant en direction de la position cible, en évitant et en contournant indépendamment les objets connus et inconnus avec un comportement de mouvement réaliste. Le système de navigation intérieur, doté d’un GPS permet au trajet du RT d’être suivi et contrôlé par l’ordinateur de contrôle central lorsqu’il est téléchargé avec le AROS (Advanced Range Operating System).
Le système de navigation intérieur et/ou GPS fournit l’emplacement physique de importe quel RT au AROS, Logiciel d'exploitation de portée avancée. L’interface graphique du AROS facile à utiliser a un design intuitif permettant de contrôler facilement un ou plusieurs RTs. Avec AROS, l’opérateur sélectionne la cible, dessine sont trajet et sélectionné le comportement désiré. Par exemple. Recule une fois touché, conformément au scénario d’entraînement prévu. Par un mode de glisser et déposer, d'autres cibles peuvent être ajoutées au scénario et programmées de manière individuelle, individuellement ou avec un comportement de suiveur, avec des RT supplémentaires après le premier RT et se déplaçant comme un essaim. AROS étant une plate-forme ouverte et une interface pour tous les groupes cibles de la gamme, il n'est pas nécessaire de changer de logiciel de contrôle lorsque vous utilisez différents types de groupes cibles, qu'il s'agisse de cibles électroniques statiques ou de cibles robotiques. Le concept repose sur un contrôle pour tous, le rendant aussi simple et convivial que possible.